Exploring the creative potential of the Franka Research 3 arm through contemplative motion, interactive painting, and emergent choreography.
Collaborate with Assistant Arts Professor Andy Garcia to investigate how industrial-grade robotics can support artistic practice. The team comprised Professor Garcia, research assistants Taojie Zhang and Evan Xiao, and the Franka Robotics support crew.
We began with off-the-shelf Desk tooling to understand motion planning fundamentals, then moved into franky-control Python workflows to gain full access to the robot’s seven-axis kinematics. Each prototype deepened our technical skillset while prompting questions about authorship, embodiment, and agency.
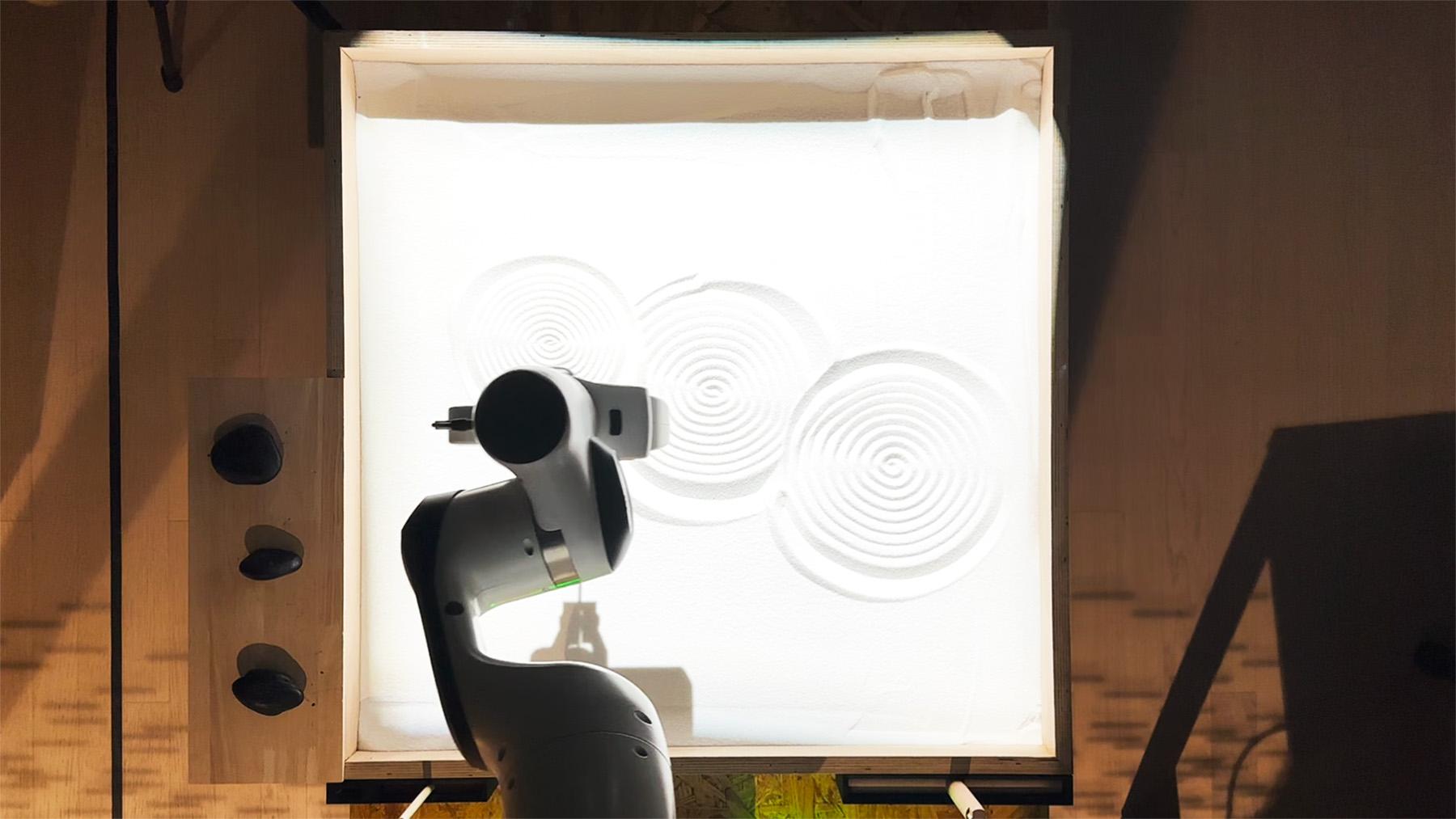
Our first exploration focused on meditative repetition. The Franka Research 3 arm drags combs, stones, and brushes through fine sand, erases the pattern, and begins again. The slow cadence invites viewers to breathe with the machine—no narrative, just an endless act of attention.

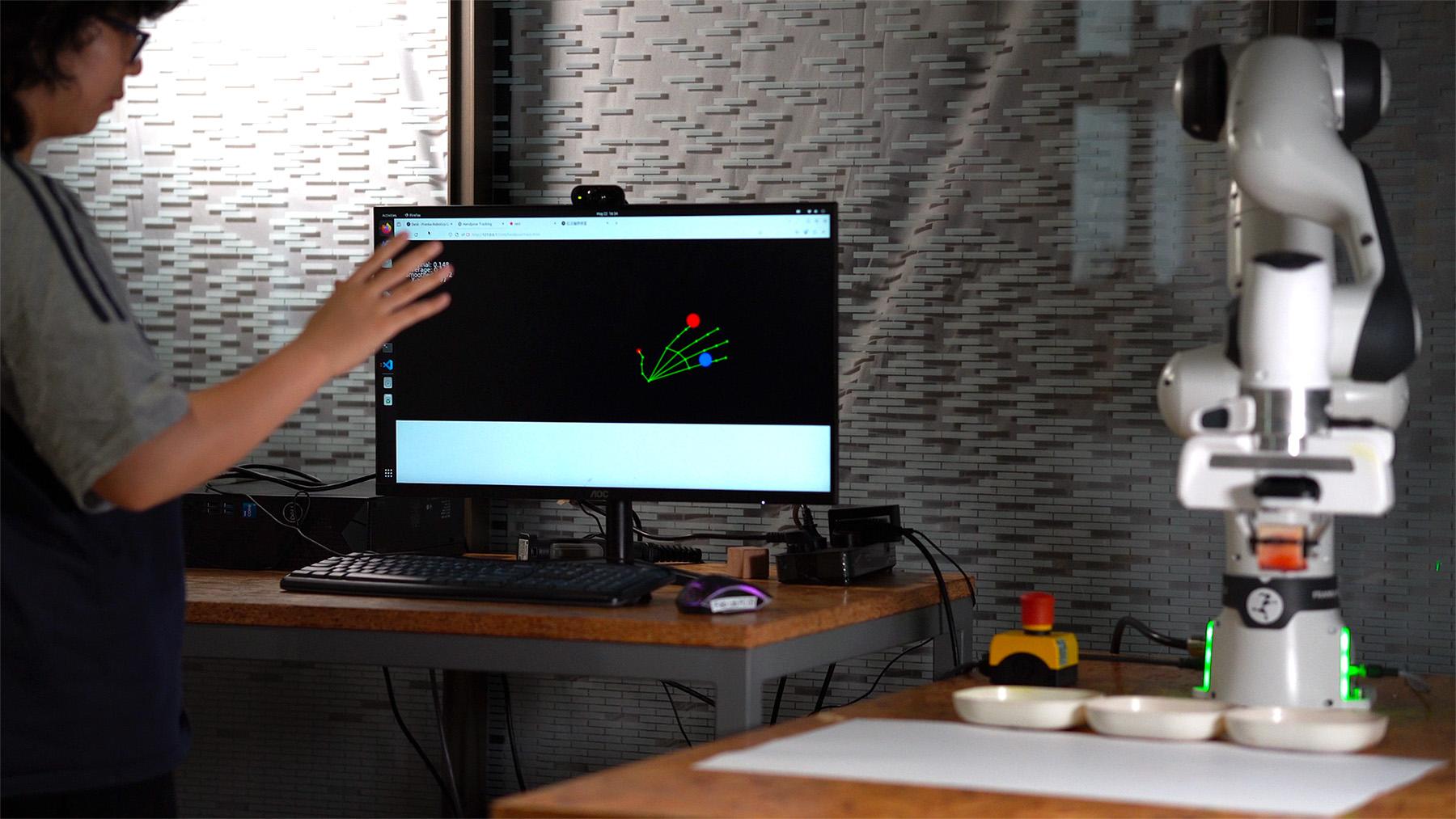
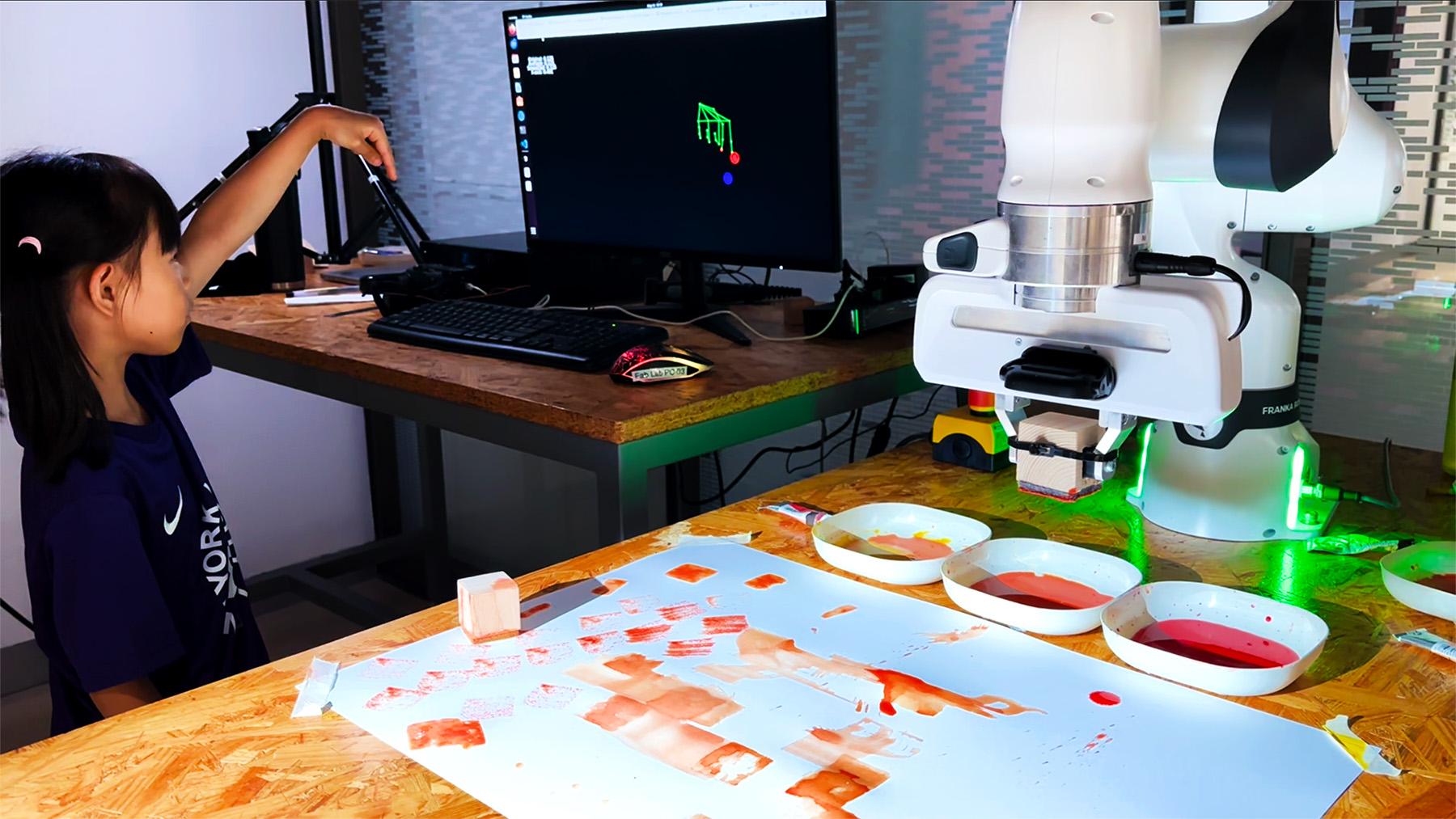
Next, we transformed the robot into a collaborative painter. Using TensorFlow.js hand pose detection, visitors could guide the brush by simply moving their hands. Forward, backward, up, and down gestures mapped to Franka’s Cartesian commands, turning the piece into a responsive, shared performance.


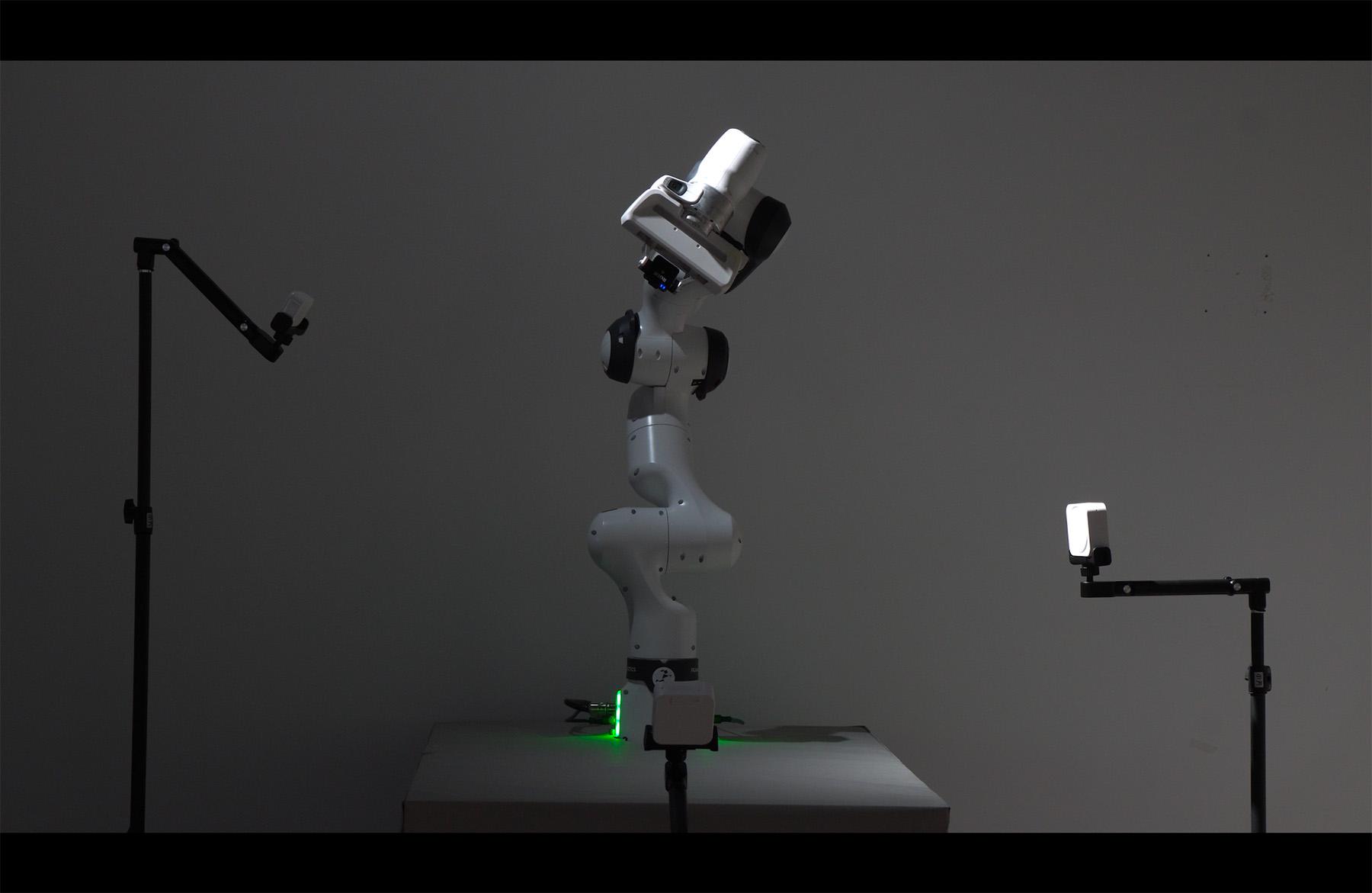
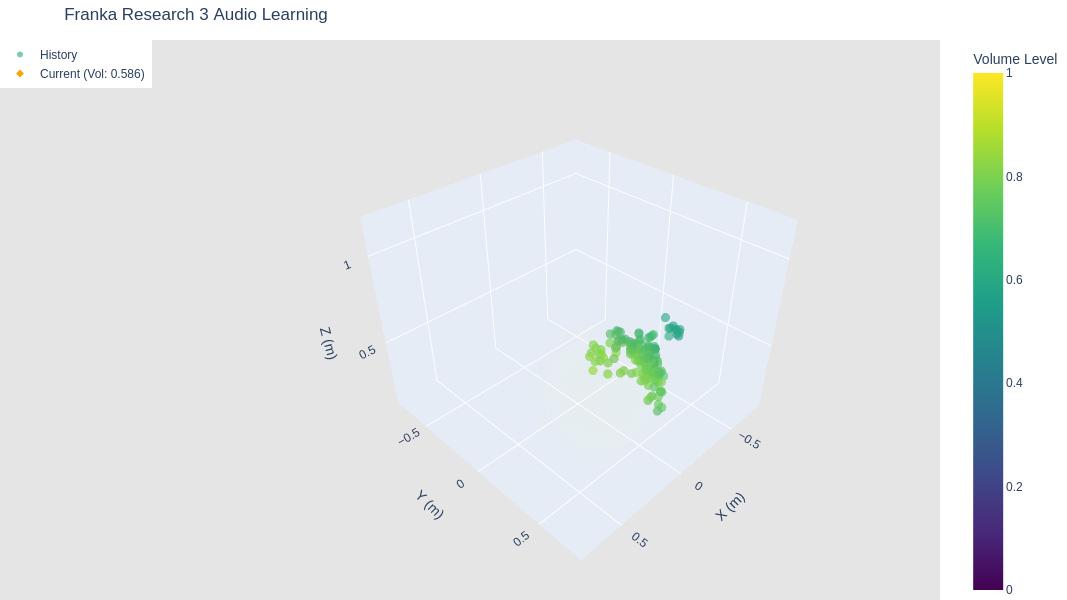
In the final study we explored emergent behavior. Three speakers around the robot pulse audio cues. Reinforcement learning rewards the arm for discovering joint configurations that move toward louder signals, prompting an ambient search across space—a kinetic listening exercise rather than a scripted routine.


“The Franka arm became a co-performer. Each iteration altered our sense of where authorship lives—sometimes in the code, sometimes in the machine, sometimes in the audience response.”
Across the semester we developed three working installations, an internal toolkit for choreographing responsive motion, and practical guidelines for staging robotic art in gallery settings. The work continues as we refine the RL pipelines and explore collaborative performances with dancers and musicians.
Thanks to Franka Robotics for equipment support and technical guidance throughout the residency.